概念与现代实践

概念与现代实践
ytkz地理空间数据:核心概念与现代实践
第二章深入探讨了地理空间数据的核心要素,从数据类型到处理技术,再到新兴范式和交换体系,全面揭示其多维特性与应用价值。地理空间数据不仅是分析的基础,还承载了从城市规划到环境监测的广泛场景。本章通过详细分类、示例代码和趋势分析,帮助读者掌握数据的结构、管理和优化方法。
一、地理空间数据的分类体系
地理空间数据按存储与表达方式分为矢量数据和栅格数据,各有独特的格式与应用场景。
1. 矢量数据:几何要素的精确表达
矢量数据以点(如兴趣点POI)、线(如道路、河流)、面(如行政区划、湖泊)描述空间信息,适合表示离散的地理对象。每个要素通常关联属性表,存储非空间信息(如名称、人口)。
- 常见格式:
- Shapefile:ESRI标准,包含
.shp(几何)、.dbf(属性)、.shx(索引)等文件,广泛用于GIS软件。 - GeoJSON:基于JSON的轻量级格式,易于Web应用(如Leaflet、Mapbox),支持动态交互。
- GeoPackage:基于SQLite的开源容器,支持多维数据(矢量、栅格、时空),适合移动端与跨平台应用。
- CAD格式(DWG/DXF):常见于工程设计,包含详细的制图元数据,适于建筑与基础设施规划。
- Shapefile:ESRI标准,包含
- 应用示例:城市道路网络分析、土地使用分区、POI分布可视化。
2. 栅格数据:像元矩阵的连续表达
栅格数据以规则的网格(像元)记录地表特征,每个像元对应特定值(如光谱反射率、高程)。适合表示连续现象,如温度分布或植被覆盖。
- 常见类型:
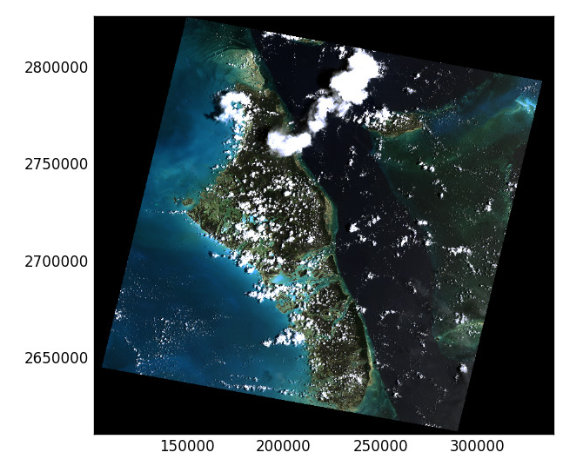
- 遥感影像:如TIFF/GeoTIFF,包含地理参考信息,支持多光谱和高分辨率数据(如Landsat、Sentinel)。
- 高程模型(DEM):记录地形高度,用于坡度分析、洪水模拟等。
- 图片格式(JPEG/PNG):需搭配“世界文件”(如
.jgw)提供地理定位,常见于简单地图展示。
- 应用示例:卫星影像分类、热力图生成、地形三维建模。
矢量与栅格的对比:
- 矢量:高精度,适合离散对象,存储需求小。
- 栅格:适合连续表面,存储需求随分辨率增加。
二、数据处理关键技术
高效处理地理空间数据需要依赖空间索引、元数据标准和预处理技术,以优化查询、存储和分析性能。
1. 空间索引机制
空间索引通过组织数据空间分布,加速查询和渲染。
- 四叉树索引:将空间递归划分为四等份,适合点数据查询(如查找最近的医院)。
- R树索引:基于边界矩形(B树变体),优化范围查询和邻近分析(如查找某区域内的所有公园)。
- 金字塔概览(Overviews):为栅格数据生成多分辨率版本,加速大尺度影像显示(如卫星地图缩放)。
示例代码(使用geopandas构建R树索引):
import geopandas as gpd
from rtree import index
# 读取矢量数据
gdf = gpd.read_file("data/cities.shp")
# 创建R树索引
idx = index.Index()
for i, geom in enumerate(gdf.geometry):
idx.insert(i, geom.bounds)
# 查询附近要素
bounds = (x_min, y_min, x_max, y_max) # 查询范围
hits = list(idx.intersection(bounds))
nearby_features = gdf.iloc[hits]2. 元数据标准
元数据记录数据的来源、坐标系、分辨率等信息,确保数据可追溯和互操作。
- ISO 19115系列:国际标准,提供详细的地理信息元数据框架,适用于学术与政府数据共享。
- Dublin Core:轻量级元数据方案,适合跨领域应用(如Web数据集描述)。
- 文件内嵌元数据:如GeoTIFF的EXIF标签,存储投影信息和传感器参数。
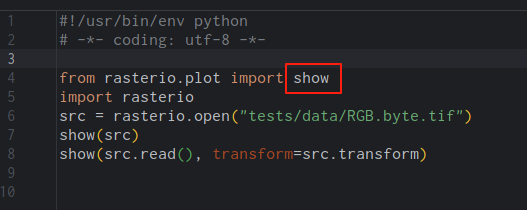
示例(读取GeoTIFF元数据):
import rasterio
with rasterio.open("data/satellite.tif") as src:
print(src.meta) # 显示元数据(如坐标系、尺寸)
print(src.tags()) # 显示内嵌标签3. 数据预处理
预处理占地理空间分析70%以上的工作量,涉及投影转换、数据清洗和格式转换。
- 投影转换:统一坐标系(如从WGS84到UTM)。
- 数据清洗:移除噪声、修复拓扑错误(如多边形重叠)。
- 格式转换:如Shapefile转为GeoJSON以适配Web应用。
示例代码(投影转换):
import geopandas as gpd
# 读取数据
gdf = gpd.read_file("data/cities.shp")
# 转换为UTM投影
gdf_utm = gdf.to_crs(epsg=32633) # UTM Zone 33N
gdf_utm.to_file("data/cities_utm.shp")三、新型数据范式
随着传感器技术与计算能力提升,地理空间数据呈现新的形态,拓展了分析维度与应用场景。
1. 点云数据
点云是由三维坐标(X, Y, Z)及其属性(如强度、RGB颜色)组成的密集点集,常通过LiDAR(激光雷达)或摄影测量生成。
- 特点:
- 高精度:捕捉复杂地形和物体细节。
- 大数据量:单次扫描可生成数亿点。
- 应用:
- 数字孪生:构建城市或工厂的3D虚拟模型。
- 林业调查:估算树高与生物量。
- 自动驾驶:生成高精度道路地图。
示例代码(使用PDAL处理点云):
import pdal
# 定义点云处理流水线
pipeline = """
{
"pipeline": [
{
"type": "readers.las",
"filename": "data/pointcloud.las"
},
{
"type": "filters.crop",
"bounds": "[100, 200, 100, 200, 0, 50]"
},
{
"type": "writers.las",
"filename": "data/cropped_pointcloud.las"
}
]
}
"""
# 执行流水线
pdal.Pipeline(pipeline).execute()2. 时空数据
时空数据融合时间戳与空间位置,适合动态现象分析(如交通流量、动物迁徙)。
- 特点:
- 时间序列:记录对象随时间的变化。
- 高维分析:需处理空间与时间双重维度。
- 支持格式:
- GeoPackage时空扩展:支持时间字段与动态查询。
- PostGIS时空类型:支持轨迹与时间序列分析。
- 应用:
- 动态可视化:生成车辆轨迹动画。
- 预测建模:分析城市扩张趋势。
示例代码(使用movingpandas分析轨迹):
import movingpandas as mpd
import geopandas as gpd
# 读取时空数据
gdf = gpd.read_file("data/trajectories.geojson")
# 创建轨迹对象
traj = mpd.Trajectory(gdf, groupby="vehicle_id", t="timestamp")
# 可视化轨迹
traj.plot()四、数据交换体系
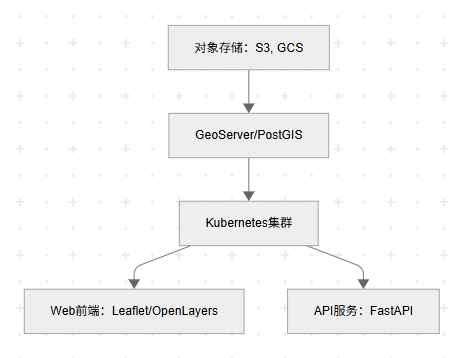
地理空间数据的共享与访问正从本地文件向服务化与数据库解决方案转变。
1. 服务化访问
通过网络协议提供实时数据访问,降低本地存储需求。
- WMS(Web Map Service):提供渲染后的地图影像,适合静态展示。
- WFS(Web Feature Service):传输矢量要素,支持动态查询与编辑。
- 云端GeoJSON API:如Overpass API,允许按需提取OpenStreetMap数据。
示例(使用owslib访问WMS):
from owslib.wms import WebMapService
# 连接WMS服务
wms = WebMapService("https://ows.terrestris.de/osm/service")
layer = wms.contents["OSM-WMS"]
# 获取地图影像
img = wms.getmap(
layers=[layer.id],
srs="EPSG:4326",
bbox=(-180, -90, 180, 90),
size=(800, 400),
format="image/png"
)
with open("map.png", "wb") as f:
f.write(img.read())2. 数据库解决方案
数据库提供高效的存储与查询能力,适合大规模数据管理。
- PostGIS:PostgreSQL的扩展,支持空间SQL查询(如缓冲区分析、空间连接)。
- SpatiaLite:基于SQLite的轻量级空间数据库,适合嵌入式应用。
- NoSQL方案:如MongoDB的地理运算符,处理非结构化地理数据。
示例代码(使用PostGIS查询):
from sqlalchemy import create_engine
import geopandas as gpd
# 连接PostGIS数据库
engine = create_engine("postgresql://user:password@localhost:5432/gis_db")
# 查询附近城市
query = """
SELECT name, geom
FROM cities
WHERE ST_DWithin(
geom,
ST_SetSRID(ST_MakePoint(-74.0060, 40.7128), 4326),
10000
)
"""
gdf = gpd.read_postgis(query, engine, geom_col="geom")
print(gdf)五、总结与趋势
地理空间数据以其多维特性(2D、3D、时空)支撑了从基础研究到复杂应用的广泛需求。本章详细解析了矢量与栅格数据的格式、处理技术(如空间索引、元数据管理)、新型范式(如点云、时空数据)以及现代交换体系(如WMS、PostGIS)。值得注意的是,数据预处理(如投影转换、清洗、索引构建)通常占分析流程的70%以上,是确保分析效率和准确性的关键。
现代趋势:
- 云端数据服务:如Google Earth Engine、AWS Data Lake,简化数据访问与处理。
- AI与大数据:结合机器学习(如影像分类)与点云分析,驱动智能应用。
- 开放数据:OpenStreetMap、Copernicus等平台促进数据共享与协作。
实践建议:
- 熟悉工具:掌握
geopandas、rasterio、PDAL等Python库。 - 参与社区:贡献QGIS插件或参与Kaggle地理空间竞赛。
- 关注前沿:探索时空分析与数字孪生技术,迎接地理空间领域的下一波浪潮。
地理空间数据不仅是分析的基石,更是连接物理世界与数字世界的桥梁。通过系统化学习与实践,读者将能从海量数据中挖掘出改变世界的洞察。
关键词:地理空间数据、矢量数据、栅格数据、空间索引、元数据、点云、时空数据、WMS、PostGIS、Python