第5章-Python地理空间算法实战

第5章-Python地理空间算法实战
ytkz引言
地理空间算法是地理信息系统(GIS)分析的核心,涵盖从基本的距离测量到复杂的空间关系建模等关键操作。这些算法不仅是GIS软件的底层支撑,也是城市规划、物流优化、环境监测等领域的技术基石。参考《Learning Geospatial Analysis with Python》(第五章“Python and Geospatial Algorithms”),本文通过数学原理、Python代码实战和实际案例,深入解析地理空间算法的实现逻辑。
本文将从距离计算入手,逐步扩展到坐标系转换、空间关系建模,并通过一个建筑物-道路连接的复杂案例展示算法应用。此外,我们还将探讨AI辅助开发(如ChatGPT)如何加速地理分析工作流,帮助开发者快速构建高效的GIS解决方案。
一、距离计算的三个维度
地理空间距离计算需考虑地球的曲率以及应用场景的尺度。以下是三种常见的距离计算方法,适用于不同场景:
1. 欧几里得距离(平面近似)
适用场景:小范围区域(如城市街区或建筑群),可忽略地球曲率。
公式:
Python实现:
from math import sqrt
def euclidean_distance(p1, p2):
"""
计算两点之间的欧几里得距离
参数:p1, p2 - 坐标元组 (x, y)
返回:距离(单位与输入坐标相同)
"""
return sqrt((p2[0] - p1[0])**2 + (p2[1] - p1[1])**2)
# 示例
p1, p2 = (0, 0), (3, 4)
print(euclidean_distance(p1, p2)) # 输出 5.0注意:该方法假设平面坐标,适合局部分析(如室内定位)。在地理坐标系(经纬度)中直接应用会导致误差。
2. 半正矢公式(Haversine)
适用场景:全球尺度(如航班航线、海洋导航),假设地球为完美球体。
Python实现:
from math import radians, sin, cos, sqrt, atan2
def haversine(lon1, lat1, lon2, lat2):
"""
计算两点之间的Haversine距离
参数:lon1, lat1, lon2, lat2 - 经纬度(十进制度)
返回:距离(千米)
"""
R = 6371 # 地球半径(千米)
d_lat = radians(lat2 - lat1)
d_lon = radians(lon2 - lon1)
a = sin(d_lat/2)**2 + cos(radians(lat1)) * cos(radians(lat2)) * sin(d_lon/2)**2
c = 2 * atan2(sqrt(a), sqrt(1-a))
return R * c
# 示例:北京到上海的距离
beijing = (116.4074, 39.9042)
shanghai = (121.4737, 31.2304)
print(haversine(*beijing, *shanghai)) # 输出约1068.94 km优势:计算速度快,适合中长距离测量。局限:忽略地球椭球形状,精度略低于Vincenty公式。
3. Vincenty公式
适用场景:高精度需求(如测绘、导航),考虑地球椭球模型(WGS84基准)。
特点:精度达毫米级,但计算复杂。推荐使用geopy库直接调用。
Python实现:
from geopy.distance import geodesic
def vincenty_distance(coord1, coord2):
"""
使用Vincenty公式计算两点距离
参数:coord1, coord2 - 坐标元组 (lat, lon)
返回:距离(千米)
"""
return geodesic(coord1, coord2).km
# 示例:Newport, RI 到 Cleveland, OH
newport_ri = (41.49008, -71.312796)
cleveland_oh = (41.499498, -81.695391)
print(vincenty_distance(newport_ri, cleveland_oh)) # 输出约866.46 km优势:高精度,适合专业应用。局限:计算开销较高,不适合实时大规模计算。
二、坐标系转换与重投影
坐标系转换是地理空间分析的基础,用于在不同投影(如WGS84、Web墨卡托)之间转换数据。pyproj是实现坐标转换的标准库。
1. WGS84 转 Web 墨卡托
场景:将地理坐标(经纬度)转换为Web地图常用的Web墨卡托投影(EPSG:3857)。
Python实现:
import pyproj
def wgs84_to_web_mercator(lon, lat):
"""
将WGS84坐标转换为Web墨卡托
参数:lon, lat - 经纬度
返回:x, y - 墨卡托坐标(米)
"""
wgs84 = pyproj.CRS('EPSG:4326')
web_mercator = pyproj.CRS('EPSG:3857')
transformer = pyproj.Transformer.from_crs(wgs84, web_mercator, always_xy=True)
x, y = transformer.transform(lon, lat)
return x, y
# 示例:北京坐标转换
beijing = (116.4074, 39.9042)
x, y = wgs84_to_web_mercator(*beijing)
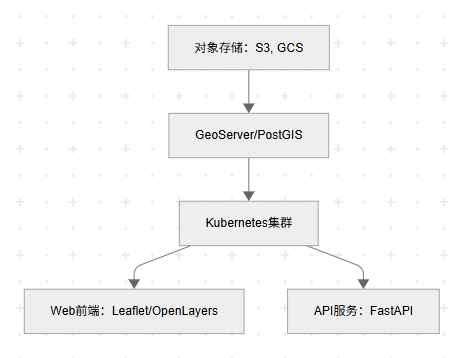
print(f"Web Mercator: ({x:.2f}, {y:.2f})") # 输出约 (12956476.47, 4853573.04)应用:Web墨卡托广泛用于Leaflet、OpenLayers等Web地图渲染。
2. 动态坐标参考系统(CRS)定义
场景:为特定区域(如极地或局部测绘)定义自定义投影。
Python实现:
import pyproj
def create_custom_crs():
"""
定义自定义Albers等面积投影
返回:CRS对象
"""
custom_crs = pyproj.CRS.from_proj4(
"+proj=aea +lat_1=20 +lat_2=60 +lon_0=40 +datum=WGS84"
)
return custom_crs
# 示例:转换到自定义CRS
wgs84 = pyproj.CRS('EPSG:4326')
custom_crs = create_custom_crs()
transformer = pyproj.Transformer.from_crs(wgs84, custom_crs, always_xy=True)
x, y = transformer.transform(116.4074, 39.9042)
print(f"Custom CRS: ({x:.2f}, {y:.2f})")应用:自定义CRS适合区域性分析(如国家地图投影)。
三、空间关系建模实战
空间关系建模是GIS分析的核心,用于计算面积、判断拓扑关系(如相交、包含)等。Shapely是Python中处理几何对象的标准库。
1. 多边形面积计算
场景:计算平面坐标系中多边形的面积。
Python实现:
from shapely.geometry import Polygon
def calculate_area(polygon_coords):
"""
计算多边形面积(平面坐标系)
参数:polygon_coords - 坐标列表 [(x1, y1), (x2, y2), ...]
返回:面积(单位与坐标系一致)
"""
polygon = Polygon(polygon_coords)
return polygon.area
# 示例:矩形面积
rect = [(0, 0), (1, 0), (1, 1), (0, 1)]
print(calculate_area(rect)) # 输出 1.0注意:平面坐标面积不考虑地球曲率,仅适用于局部范围。
2. 地理坐标系面积计算
场景:计算地理坐标系(WGS84)中多边形的真实面积,需重投影到等面积投影(如UTM)。
Python实现:
from shapely.geometry import Polygon
from shapely.ops import transform
from pyproj import Transformer
def calculate_geo_area(polygon_coords):
"""
计算地理坐标系多边形的真实面积
参数:polygon_coords - WGS84坐标列表 [(lon1, lat1), ...]
返回:面积(平方米)
"""
polygon = Polygon(polygon_coords)
wgs84 = pyproj.CRS('EPSG:4326')
utm_crs = pyproj.CRS('EPSG:32650') # 示例:UTM Zone 50N
wgs84_to_utm = Transformer.from_crs(wgs84, utm_crs, always_xy=True)
utm_polygon = transform(wgs84_to_utm.transform, polygon)
return utm_polygon.area
# 示例:北京周边区域
area_coords = [(116.3, 39.8), (116.5, 39.8), (116.5, 40.0), (116.3, 40.0)]
print(calculate_geo_area(area_coords)) # 输出约 43160000 平方米注意:选择合适的UTM分区以确保精度。
3. 拓扑关系分析
场景:分析点、线、面之间的拓扑关系,如点在线上的投影。
Python实现:
from shapely.geometry import Point, LineString
def project_point_to_line(line_coords, point_coords):
"""
将点投影到线段并返回最近点
参数:line_coords - 线段坐标列表 [(x1, y1), ...], point_coords - 点坐标 (x, y)
返回:最近点的坐标
"""
line = LineString(line_coords)
point = Point(point_coords)
projection = line.project(point)
nearest_point = line.interpolate(projection)
return nearest_point.x, nearest_point.y
# 示例:点到折线的投影
line_coords = [(0, 0), (1, 1), (2, 0)]
point_coords = (0.5, 0.5)
x, y = project_point_to_line(line_coords, point_coords)
print(f"Nearest point: ({x}, {y})") # 输出 (0.5, 0.5)应用:用于路径规划、设施定位等。
四、复杂空间分析案例:建筑物-道路连接
目标:将建筑物多边形的质心连接到最近的道路,生成连接线并保存为Shapefile。
场景:城市规划中,需分析建筑物到道路的接入路径。
Python实现:
import fiona
from shapely.geometry import shape, mapping, LineString
from shapely.ops import nearest_points
def connectBuildingsToRoads(buildings_shp, roads_shp, output_shp):
"""
将建筑物质心连接到最近道路,生成连接线
参数:
buildings_shp - 建筑物Shapefile路径
roads_shp - 道路Shapefile路径
output_shp - 输出连接线Shapefile路径
"""
# 加载数据
with fiona.open(buildings_shp) as src:
buildings = [shape(feat['geometry']) for feat in src]
with fiona.open(roads_shp) as src:
roads = [shape(feat['geometry']) for feat in src]
# 生成连接线
connections = []
for bldg in buildings:
centroid = bldg.centroid
min_dist = float('inf')
nearest_road = None
for road in roads:
dist = centroid.distance(road)
if dist < min_dist:
min_dist = dist
nearest_road = road
if nearest_road:
closest_point = nearest_points(centroid, nearest_road)[1]
connections.append({
'geometry': mapping(LineString([centroid, closest_point]))
})
# 保存结果
schema = {'geometry': 'LineString', 'properties': {}}
with fiona.open(output_shp, 'w', 'ESRI Shapefile', schema) as dst:
for conn in connections:
dst.write({'geometry': conn['geometry'], 'properties': {}})
# 示例:假设文件存在
connectBuildingsToRoads("buildings.shp", "roads.shp", "connections.shp")优化建议:
- 使用R树空间索引(
rtree库)加速最近邻搜索。 - 并行化处理大批量数据(使用
multiprocessing)。
应用:城市交通规划、服务设施选址。
五、AI辅助开发:ChatGPT在地理分析中的应用
AI工具如ChatGPT可显著提高地理空间分析的开发效率,尤其在生成代码原型和调试算法方面。
示例:生成缓冲区分析代码
Prompt:
用Python实现:读取Shapefile中的点要素,生成1公里的缓冲区,输出为GeoJSON。
ChatGPT输出(优化版):
import geopandas as gpd
from pyproj import CRS
def create_buffers(input_shp, output_geojson, buffer_distance=1000):
"""
为Shapefile中的点生成缓冲区并保存为GeoJSON
参数:
input_shp - 输入Shapefile路径
output_geojson - 输出GeoJSON路径
buffer_distance - 缓冲区距离(米)
"""
# 读取点数据
gdf = gpd.read_file(input_shp)
# 自动选择合适的UTM投影
centroid = gdf.geometry.centroid
lon, lat = centroid.x.mean(), centroid.y.mean()
utm_zone = int((lon + 180) / 6) + 1
utm_crs = CRS(f"EPSG:{32600 + utm_zone}")
# 生成缓冲区
gdf_utm = gdf.to_crs(utm_crs)
buffers = gdf_utm.buffer(buffer_distance)
buffers_wgs84 = buffers.to_crs(gdf.crs)
# 保存结果
gdf_buffers = gpd.GeoDataFrame(geometry=buffers_wgs84, crs=gdf.crs)
gdf_buffers.to_file(output_geojson, driver="GeoJSON")
# 示例
create_buffers("points.shp", "buffers.geojson", 1000)优势:
- 自动选择UTM投影,适应不同区域。
- 代码结构清晰,易于扩展。
局限:AI生成代码需人工验证,尤其是CRS选择和数据格式兼容性。
六、总结与进阶
本文通过距离计算、坐标转换、空间关系建模和复杂案例,系统展示了Python在地理空间算法中的应用。核心要点包括:
- 算法体系:从欧几里得距离到Vincenty公式,覆盖多尺度距离测量;Shapely和PyProj支持灵活的几何操作与投影转换。
- 混合编程:结合Shapely(几何)、PyProj(投影)和Fiona(文件I/O)构建完整工作流。
- 性能优化:空间索引(如R树)和并行计算可显著提升效率。
- AI协同:ChatGPT等工具加速代码生成,适合快速原型开发。
推荐扩展工具
- GeoPandas:基于Pandas的地理数据框架,简化数据处理。
- NetworkX:路网分析工具,适合路径优化。
- Dask-GeoPandas:分布式计算框架,处理大规模地理数据。
- PyVista:三维空间分析与可视化。
- Apache Kafka:实时地理数据流处理。
应用场景
- 物流优化:使用最短路径算法(Dijkstra)规划配送路线。
- 城市规划:基于缓冲区分析确定服务设施覆盖范围。
- 环境监测:通过空间插值(Kriging)预测污染物分布。
- GeoAI:结合深度学习进行影像分类和对象检测。
进阶方向
- 三维空间分析:使用PyVista处理LiDAR点云数据。
- 实时计算:结合Kafka和Flink处理动态GPS数据。
- 空间机器学习:开发GeoAI模型,如基于GNN的路网预测。
结语
地理空间算法是空间智能时代的核心驱动力。通过Python生态(如GeoPandas、Shapely、PyProj),开发者能够快速实现从距离计算到复杂空间分析的完整工作流。结合AI辅助开发和云计算,地理分析正迈向高效化、智能化。掌握这些算法和技术,不仅能应对传统GIS任务,还能为智慧城市、自动驾驶等前沿领域提供坚实支持。
参考资源:
- 《Learning Geospatial Analysis with Python》(Packt Publishing)
- GeoPandas文档:https://geopandas.org/
- OSGeo社区:https://www.osgeo.org/
- 数据源:OpenStreetMap、USGS Earth Explorer