第9章-Python地理空间建模与实时分析实战指南

第9章-Python地理空间建模与实时分析实战指南
ytkz引言
地理空间分析不仅是理解地球现状的工具,更是预测未来、优化决策和模拟复杂现象的关键技术。随着Python生态的快速发展,其在地理空间领域的应用日益广泛,从高级建模到实时数据处理均展现出强大潜力。本文以Python为核心,结合《Learning Geospatial Analysis with Python》的核心技术,深入探讨地理空间建模与实时分析的关键方法,提供可操作的代码示例和最佳实践,助力开发者构建从预测到实时的完整解决方案。
一、高级地理空间建模
高级地理空间建模将地理数据转化为预测和决策工具,涵盖植被监测、洪水模拟、路径优化等场景。以下是核心技术及其Python实现:
1. 归一化植被指数(NDVI)计算
NDVI是评估植被健康的核心指标,利用卫星影像的红光(Red)和近红外(NIR)波段计算,公式为:
[
NDVI = \frac{NIR - Red}{NIR + Red}
]
NDVI值范围为[-1, 1],正值表示健康植被,负值或接近零表示无植被覆盖。
import numpy as np
import rasterio
def calculate_ndvi(red_path, nir_path):
# 读取红光和近红外波段
with rasterio.open(red_path) as red_ds, rasterio.open(nir_path) as nir_ds:
red = red_ds.read(1).astype(float)
nir = nir_ds.read(1).astype(float)
# 处理无效值并计算NDVI
np.seterr(divide='ignore', invalid='ignore')
ndvi = (nir - red) / (nir + red)
ndvi = np.clip(ndvi, -1, 1)
return ndvi
# 保存NDVI结果为GeoTIFF
def save_ndvi(ndvi, red_path, output_path):
with rasterio.open(red_path) as src:
profile = src.profile
profile.update(dtype=rasterio.float32, count=1)
with rasterio.open(output_path, 'w', **profile) as dst:
dst.write(ndvi, 1)应用场景:
- 农业监测:基于Sentinel-2影像定期计算NDVI,评估作物生长。
- 森林管理:结合时间序列NDVI,预测火灾风险。
- 优化建议:使用
xarray管理多时相影像,结合dask处理大尺度数据。
2. 洪水淹没模型
洪水模拟基于数字高程模型(DEM),通过迭代扩散模拟水流覆盖区域。以下代码实现基于高程阈值的洪水扩展:
import numpy as np
from scipy.ndimage import binary_dilation
import rasterio
def flood_simulation(dem_path, start_point, water_level, iterations=1000):
# 读取DEM
with rasterio.open(dem_path) as ds:
dem = ds.read(1)
# 初始化淹没区域
flooded = np.zeros_like(dem, dtype=bool)
flooded[start_point] = True
# 迭代扩展淹没区域
for _ in range(iterations):
neighbors = binary_dilation(flooded)
candidates = (dem <= water_level) & neighbors
flooded = flooded | candidates
if not candidates.any(): # 提前终止
break
return flooded
# 保存淹没区域为GeoTIFF
def save_flood_map(flooded, dem_path, output_path):
with rasterio.open(dem_path) as src:
profile = src.profile
profile.update(dtype=rasterio.uint8, count=1)
with rasterio.open(output_path, 'w', **profile) as dst:
dst.write(flooded.astype(np.uint8), 1)应用场景:
- 城市防涝:模拟暴雨积水区域,优化排水设计。
- 水库管理:评估泄洪影响。
- 优化建议:结合
numba加速迭代,使用rioxarray简化栅格I/O。
3. 最小成本路径分析
最小成本路径分析用于规划复杂地形中的最优路线,适用于输电线选址或应急救援。以下代码基于networkx实现A*算法:
import numpy as np
import networkx as nx
import rasterio
def least_cost_path(cost_surface_path, start, end):
# 读取成本面
with rasterio.open(cost_surface_path) as ds:
cost_surface = ds.read(1)
# 构建网格图
graph = nx.grid_2d_graph(*cost_surface.shape)
for (x, y) in graph.nodes:
graph.nodes[(x, y)]['cost'] = cost_surface[x, y]
# 定义权重函数
def weight(u, v, d):
return (graph.nodes[u]['cost'] + graph.nodes[v]['cost']) / 2
# A*路径搜索
path = nx.astar_path(graph, start, end, weight=weight)
return path
# 保存路径为GeoJSON
def save_path(path, dem_path, output_path):
from shapely.geometry import LineString
import geopandas as gpd
with rasterio.open(dem_path) as src:
coords = [src.xy(x, y) for x, y in path]
gdf = gpd.GeoDataFrame(geometry=[LineString(coords)], crs=src.crs)
gdf.to_file(output_path, driver='GeoJSON')应用场景:
- 基础设施规划:优化输电线或管道路径。
- 应急救援:规划灾区撤离路线。
- 优化建议:结合
OSMnx加载路网数据,使用GDAL处理高分辨率成本面。
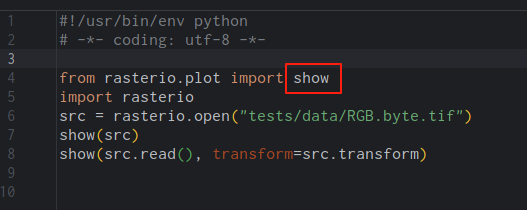
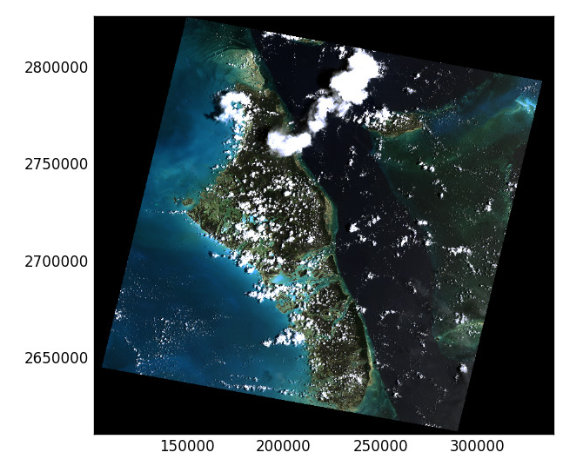
4. 卫星图像云量计算
云量评估用于筛选可用影像,是遥感分析的关键步骤。以下代码基于Otsu阈值分割:
import numpy as np
from skimage.filters import threshold_otsu
import rasterio
def cloud_coverage(rgb_path):
# 读取RGB影像
with rasterio.open(rgb_path) as ds:
rgb = ds.read([1, 2, 3]).transpose(1, 2, 0) # 转换为HWC格式
# 转换为灰度
gray = np.mean(rgb, axis=2)
thresh = threshold_otsu(gray)
cloud_mask = gray > thresh
cloud_fraction = np.sum(cloud_mask) / cloud_mask.size
return cloud_fraction
# 批量处理影像
def batch_cloud_coverage(image_paths):
results = {}
for path in image_paths:
coverage = cloud_coverage(path)
results[path] = coverage
return results应用场景:
- 遥感影像筛选:过滤云量过高的影像。
- 优化建议:结合深度学习(如U-Net)区分云、雪和沙漠,使用
pytorch实现。
二、实时地理空间分析
实时地理空间分析处理高频数据流,构建快速响应系统,涵盖车辆追踪、灾害预警等领域。以下是核心技术和实现:
1. 实时车辆追踪系统
实时车辆追踪结合MQTT协议和地理计算,用于车队监控或共享出行。以下代码实现位置更新和超速检测:
import paho.mqtt.client as mqtt
from geopy.distance import geodesic
import time
import json
class VehicleTracker:
def __init__(self, mqtt_broker="localhost", topic="vehicle/position"):
self.positions = {} # {vehicle_id: (lat, lon, timestamp)}
self.client = mqtt.Client()
self.client.on_message = self.on_message
self.client.connect(mqtt_broker)
self.client.subscribe(topic)
self.client.loop_start()
def on_message(self, client, userdata, msg):
try:
data = json.loads(msg.payload.decode())
vehicle_id = data['id']
lat, lon = data['lat'], data['lon']
timestamp = data.get('timestamp', time.time())
self.update_position(vehicle_id, lat, lon, timestamp)
except Exception as e:
print(f"Error processing message: {e}")
def update_position(self, vehicle_id, lat, lon, timestamp):
prev = self.positions.get(vehicle_id)
if prev:
dt = timestamp - prev[2]
dist = geodesic((prev[0], prev[1]), (lat, lon)).meters
speed = dist / dt if dt > 0 else 0
if speed > 30: # 30 m/s ≈ 108 km/h
print(f"Alert: Vehicle {vehicle_id} speeding at {speed:.2f} m/s")
self.positions[vehicle_id] = (lat, lon, timestamp)
# 启动追踪器
tracker = VehicleTracker()技术栈:
- MQTT:轻量级消息传输,适合IoT设备。
- Redis:缓存位置数据,降低数据库压力。
- Folium:实时渲染车辆轨迹。
应用场景:物流车队管理、共享单车调度。
2. 风暴追踪与现场报告集成
风暴追踪系统整合实时路径和现场报告,用于灾害预警。以下代码实现缓冲区分析:
import geopandas as gpd
from shapely.geometry import Point, LineString
import pandas as pd
def integrate_reports(storm_path_coords, field_reports):
# 风暴路径
storm_path = gpd.GeoDataFrame(
geometry=[LineString(storm_path_coords)],
crs="EPSG:4326"
)
# 现场报告
gdf = gpd.GeoDataFrame(
field_reports,
geometry=[Point(r['lon'], r['lat']) for r in field_reports],
crs="EPSG:4326"
)
# 10公里缓冲区
buffer = storm_path.buffer(0.1) # 约10km
affected_reports = gdf[gdf.intersects(buffer.unary_union)]
return affected_reports.to_json()
# 测试数据
storm_path = [(30.5, -90.5), (30.6, -90.4), (30.7, -90.3)]
reports = [
{'lat': 30.55, 'lon': -90.45, 'damage': 'severe'},
{'lat': 31.0, 'lon': -90.0, 'damage': 'minor'}
]
result = integrate_reports(storm_path, reports)应用场景:
- 灾害响应:整合气象数据和现场报告,优化救援部署。
- 优化建议:使用
PostGIS进行高效空间查询,结合Grafana可视化影响。
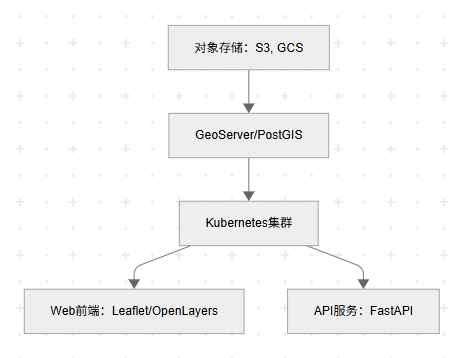
3. 实时数据流处理架构
实时分析需要高吞吐量、低延迟的架构。推荐组件:
- Kafka:分发TB级数据流。
- Flink:窗口化聚合,处理复杂事件(如车辆密度异常)。
- PostGIS:支持时空查询(如“过去1小时内的超速点”)。
- Grafana:实时仪表盘,展示关键指标。
示例架构:
- IoT设备通过MQTT推送位置数据至Kafka。
- Flink消费Kafka流,计算实时指标。
- PostGIS存储轨迹,支持空间查询。
- Grafana渲染热力图和警报。
三、工具链与最佳实践
工具推荐
| 场景 | 工具 | 优势 |
|---|---|---|
| 栅格处理 | Rasterio + NumPy | 内存高效,兼容GDAL,支持COG |
| 矢量分析 | GeoPandas + Shapely | Pandas式API,空间操作直观 |
| 路径规划 | OSMnx + NetworkX | 开源路网数据,图算法集成 |
| 实时计算 | Faust + Apache Kafka | Python原生,低延迟流处理 |
| 可视化 | Folium + Plotly Dash | 交互式地图,快速原型开发 |
性能优化技巧
JIT加速:
使用numba编译计算密集型函数:from numba import jit import numpy as np @jit(nopython=True) def flood_simulation_numba(dem, start_point, water_level): flooded = np.zeros_like(dem, dtype=np.bool_) flooded[start_point] = True for _ in range(1000): new_flooded = flooded.copy() for i in range(1, dem.shape[0]-1): for j in range(1, dem.shape[1]-1): if flooded[i, j]: for di, dj in [(-1,0), (1,0), (0,-1), (0,1)]: ni, nj = i + di, j + dj if dem[ni, nj] <= water_level: new_flooded[ni, nj] = True flooded = new_flooded if not (flooded != new_flooded).any(): break return flooded分布式计算:
使用dask并行处理TB级栅格:import dask.array as da import rasterio large_raster = da.from_zarr("s3://bucket/terrain.zarr") mean_elevation = large_raster.mean().compute()内存优化:
- 使用
Rasterio的窗口读取,降低大文件内存占用。 - 结合
zarr存储格式,支持云原生分析。
四、未来趋势
地理空间分析正向智能化、实时化和云原生方向发展:
- GeoAI融合:
- 图神经网络(GNN):通过
PyTorch Geometric建模路网,预测交通流量。 - Transformer:处理多时相遥感数据,检测土地变化。
- 图神经网络(GNN):通过
- 数字孪生:
- 使用
CesiumJS整合IoT数据,构建城市3D孪生体。 - 案例:智慧城市交通仿真。
- 使用
- 边缘智能:
- 卫星搭载NVIDIA Jetson模块,实现实时云检测。
- 优势:减少地面传输延迟。
- 开放标准:
- COG(Cloud Optimized GeoTIFF):通过
rioxarray访问云端影像。 - STAC(SpatioTemporal Asset Catalog):统一管理时空数据。
- COG(Cloud Optimized GeoTIFF):通过
五、总结与学习建议
通过高级建模和实时分析技术,开发者可以构建从预测到响应的地理空间系统。例如:
- 使用NDVI监测农作物,结合气象流预警干旱。
- 基于洪水模型预演灾情,通过车辆追踪调度救援。
学习建议:
- 数据集:从Sentinel-2、OpenStreetMap或USGS获取公开数据。
- 原型开发:用
Folium或Plotly Dash快速可视化。 - 竞赛实践:参与Kaggle的“Open Cities AI Challenge”。
- 社区资源:
- Google Earth Engine Python API
- Real-Time GIS with Apache Kafka
- PyTorch Geometric for Spatial-Temporal GNNs
地理空间分析的未来属于驾驭模型复杂性和数据实时性的开发者。Python的工具生态持续扩展,赋能更智能的空间决策系统。