点云文件的深入解析

点云文件的深入解析
ytkz引言
点云技术正在重塑我们对现实世界的数字化理解,从自动驾驶的感知系统到数字孪生的虚拟建模,这项技术无处不在。对于初学者来说,理解点云文件的本质、格式以及处理逻辑,是迈向三维视觉领域的第一步。本文以一个简单的XYZ文件为例,深入解析点云的特性,并为“小白”提供循序渐进的学习建议,助你轻松入门。
点云的定义与本质
点云是一种三维数据形式,由大量空间坐标点组成。每个点通常包含x、y、z坐标,有时还会附带额外属性,比如颜色、反射强度或法向量。

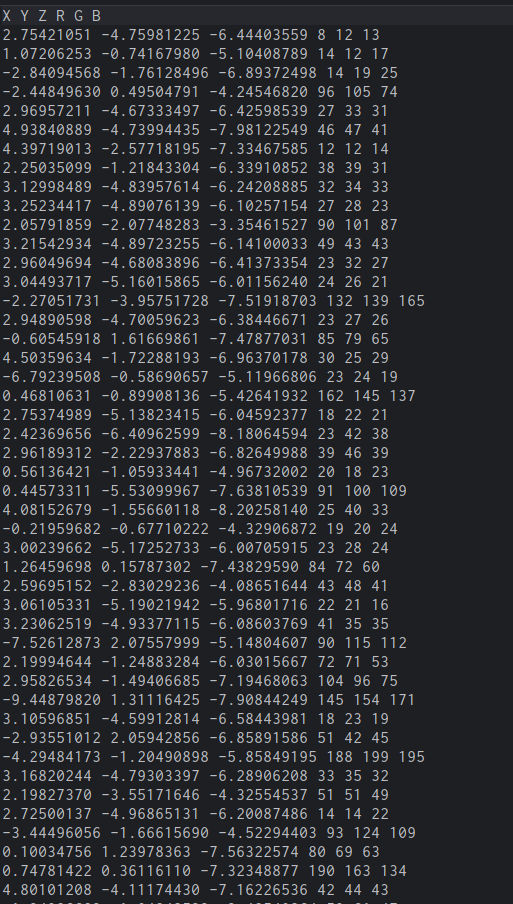
例如,一行点云数据可能是“2.75421051 -4.75981225 -6.44403559 8 12 13”,其中前三列表示空间位置,后三列是RGB颜色值(范围0-255)。与传统的3D模型(通过三角面片描述表面)不同,点云没有网格结构,完全依靠离散的点来表达物体的形态。
点云数据通常来源于3D扫描设备(如激光雷达)或摄影测量软件,应用范围涵盖3D CAD建模、地理信息系统(GIS)和质量检测等领域。尽管点云看似是一堆杂乱无章的点,但其中蕴含着“隐藏的秩序”:
- 空间参考系:所有点的坐标都基于某个坐标系,比如设备局部坐标系(以设备为原点0, 0, 0)或地理坐标系(如WGS84,用于地图测绘)。
- 采集逻辑:点的排列顺序反映了扫描方式。例如,激光雷达按扫描线记录点,深度相机则按帧结构存储。
假设某文件中第一行和第五行的X、Y、Z值接近,且颜色相似,这些点可能属于同一物体表面。加载到可视化工具后,这些点就能自动组成三维结构。以下是一个xyz点云文件:
点云文件格式与分类
点云文件的格式多种多样,适应不同的应用场景。以XYZ文件为例,它属于基础型格式,简单轻便,但也有局限性:
- 研究表明,XYZ格式通常是ASCII文本,每行代表一个点,列之间用空格或逗号分隔。除了基本的x、y、z坐标,它还可以扩展存储颜色等属性。
- 有时会误认为XYZ只存坐标,但实际上它能携带更多信息,比如RGB值。
点云文件大致可分为两类:
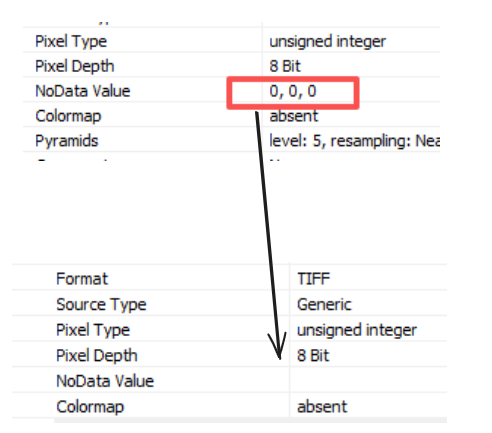
- 基础型:如XYZ,适合快速交换数据。缺点是没有元数据(比如坐标系信息),需要额外说明。
- 扩展型:如PLY、PCD、LAS,能存储颜色、法向量等丰富信息,功能更强大。
以下是常见格式的对比:
| 格式 | 类型 | 特点 | 应用场景 |
|---|---|---|---|
| XYZ | ASCII文本 | 简单、轻量,可扩展(如含RGB) | 数据交换,初学者学习 |
| PLY | ASCII/二进制 | 支持自定义属性(如颜色、法向量) | 三维重建,研究 |
| PCD | 二进制为主 | 分有序/无序,适合实时处理 | 机器人,计算机视觉 |
| LAS | 二进制 | 带地理元数据,专为LiDAR设计 | 测绘,地质勘探 |
- PLY适合三维重建,能灵活存储多种属性。
- PCD广泛用于机器人操作系统(ROS),支持实时处理。
- LAS则是测绘和林业领域的标配,专为激光雷达数据设计。
处理与可视化:从数据到三维场景
处理点云需要专用工具,常见的包括CloudCompare和Open3D:
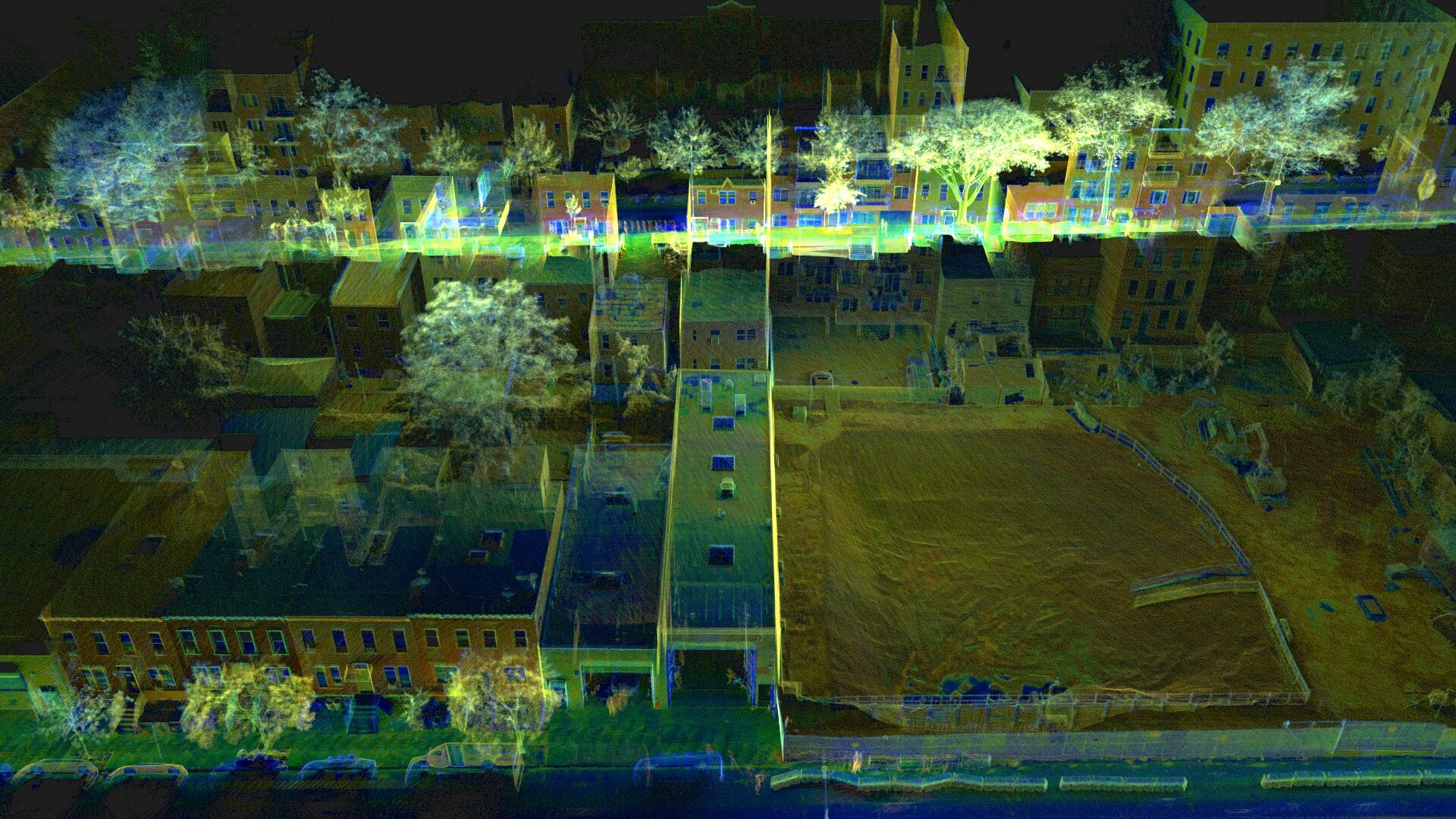
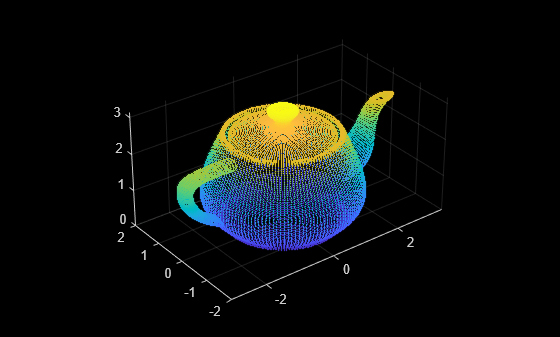
- CloudCompare:一款开源软件,支持点云的可视化、编辑和分析。导入一个XYZ文件后,可以看到7个点散布在三维空间,颜色各异(比如RGB为96,105,74的点呈现浅绿色)。如果数据来自激光雷达,可能会观察到“近密远疏”现象——靠近设备时点密集,远处则稀疏,这是激光扫描的典型特征。
在CloudCompare打开xyz文件,如下所示:

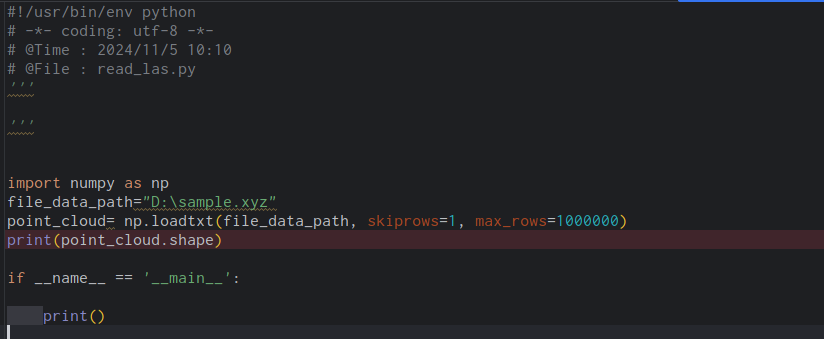
代码示例:用Python加载点云数据:
import numpy as np file_data_path = "D:\sample.xyz" point_cloud = np.loadtxt(file_data_path, skiprows=1, max_rows=1000000) print(point_cloud.shape)
- 可视化原理:工具通过透视投影将三维点映射到二维屏幕,用户可以旋转、缩放,观察点的分布。比如,若Z值在-4到-8之间,这些点可能构成一个向下倾斜的平面或物体的一部分。
点云处理的关键步骤
从原始点云到生成实用模型,通常需要以下步骤:
- 去噪:剔除离群点(比如扫描误差产生的孤立点),确保数据干净。
- 配准:如果有多份点云(比如从不同角度扫描),需要将它们对齐到同一坐标系。
- 重建:通过算法生成表面(比如三角化),或者直接分析点云数据。
- 应用:计算物体体积、识别形状,服务于自动驾驶、数字孪生等场景。
结论
本文以一个XYZ文件为例,深入浅出地解析了点云的本质、格式和处理逻辑,非常适合初学者入门。
点云技术潜力巨大,掌握其原理和工具,就能打开三维视觉的大门。建议多动手实践,从小数据开始,逐步深入,探索更多令人兴奋的应用场景。