DINOv3是什么?DINOv3解决了遥感中哪些难点?
在计算机视觉领域,预训练模型的发展正快速演进。Meta 最新发布的 DINOv3,成为了自监督视觉模型中的新里程碑。它最大的亮点是:冻结主干(frozen backbone)即可在密集预测任务中达到最先进的效果,让团队能够“少折腾大模型,多专注小任务头(head)”。
为什么 DINOv3 值得关注?
大规模无标签预训练 DINOv3 使用自监督学习(SSL),在两个超大规模数据集上训练:
LVD-1689M(16.89 亿张网络图像)
SAT-493M(4.93 亿张卫星图像) 不依赖人工标注,就能充分利用数十亿张图像。
开箱即用的密集特征 主干冻结后,仅用简单的线性或轻量级 head,就能在分割、深度估计、图像检索等任务中拿到 SOTA 结果。
跨领域的单一主干 一个 DINOv3 主干即可跨越自然图像、卫星遥感、工业检测等领域,性能超过很多专门微调的模型。
生态支持完善 已经登陆 Hugging Face,配备官方 API、模型卡和示例代码,可以即刻上手。
DINOv3 的技术升级(相对 DINOv2)
训练目标改 ...
选择学习哪种编程语言主要取决于你的目标和兴趣。
如果你想开发网站,JavaScript、HTML 和 CSS 是前端开发的首选,Python 、PHP 、go、java则适合后端;
想做数据分析或机器学习,Python 和 R 是不错的选择;
如果目标是移动应用开发,Swift(iOS)或 Kotlin(Android)更合适;
对于系统编程或高性能应用,C++ 或 Rust 是不二之选。
每种语言都有其独特生态和适用场景,明确你的项目需求后,选择一门易上手且社区活跃的语言,能让你事半功倍。
我目前的主力编程语言是 Python,其他语言虽然接触过,但还谈不上熟练。
实际上,最近这两个月,我越来越多地使用自然语言来“写”代码,而不是直接手写编程语言。回想起2024年刚开始接触 GitHub Copilot 的时候,我还不太理解为什么微软把它叫做 “Copilot”。但现在回过头看,不得不佩服老外起名字的精准——AI 编程助手所扮演的角色,确实就是“副驾驶”。
而我是主驾驶,它则辅助我完成整个编程过程。
甚至有时,是倒反天罡,我只管输入和输出,中间过程代码编写,debug等等全程它自己 ...
选择学习哪种编程语言主要取决于你的目标和兴趣。
如果你想开发网站,JavaScript、HTML 和 CSS 是前端开发的首选,Python 、PHP 、go、java则适合后端;
想做数据分析或机器学习,Python 和 R 是不错的选择;
如果目标是移动应用开发,Swift(iOS)或 Kotlin(Android)更合适;
对于系统编程或高性能应用,C++ 或 Rust 是不二之选。
每种语言都有其独特生态和适用场景,明确你的项目需求后,选择一门易上手且社区活跃的语言,能让你事半功倍。
我目前的主力编程语言是 Python,其他语言虽然接触过,但还谈不上熟练。
实际上,最近这两个月,我越来越多地使用自然语言来“写”代码,而不是直接手写编程语言。回想起2024年刚开始接触 GitHub Copilot 的时候,我还不太理解为什么微软把它叫做 “Copilot”。但现在回过头看,不得不佩服老外起名字的精准——AI 编程助手所扮演的角色,确实就是“副驾驶”。
而我是主驾驶,它则辅助我完成整个编程过程。
甚至有时,是倒反天罡,我只管输入和输出,中间过程代码编写,debug等等全程它自己 ...

要将Python 代码打包成 .so 文件,通常使用 Cython 工具,通过编写一个 setup.py 文件来指定需要编译的Python 文件,然后在命令行中使用 python setup.py build_ext --inplace 命令来编译。编译完成后,即可像普通模块一样在Python 中导入并使用生成的 .so 文件。
具体步骤:
安装Cython
如果尚未安装Cython,请先安装它:
pip install cython
根据您的操作系统,可能还需要安装C 语言编译器,例如在Linux 上使用 gcc 和 python-devel。
编写Python 源文件
创建您需要打包的Python 文件,例如 hello.py。
创建 setup.py 文件
在与Python 源文件相同的目录下,创建一个名为 setup.py 的文件。文件内容如下:
from distutils.core import setup
from Cython.Build import cythonize
setup(
ext_modules = cythonize([" ...
很多刚接触编程的朋友都会问:我该学 C++ 还是 Python?
如果把这两种语言比作汽车,C++ 就像一辆老式保时捷,手动挡、手动摇窗器、硬悬挂——跑得快,但开起来并不舒服;Python 则像一辆全自动的家用轿车,带杯架、座椅加热、自动泊车——开起来轻松惬意。
所以问题的关键在于:你喜欢编程的哪一点?
如果你是那种喜欢钻研细节的“汽车发烧友”,愿意花几个小时钻到车底下拆零件,熟悉每颗螺丝的名字,乐于把发动机的最后一匹马力都榨出来,也不介意为了超车而提前做大量准备,那么 C++ 很适合你。
如果你更在意的是车子能不能舒舒服服地带你去目的地,至于引擎如何运转、底盘如何设计并不重要,那么 Python 会更合适。
简单来说:
C++ 是写给那些热爱编程本身的人。
Python 是写给那些想用编程实现东西的人。
一些补充 编程是个很宽的领域,不同背景的人会有完全不同的看法。写游戏、做硬件驱动的人和我这种“用代码做遥感处理”的人,需求完全不同。有人建议每年学一门新的语言。对初学者来说,如果只能选第一门语言,我还是推荐从 Python 开始。因为不用管内存分配、指针、模板这些底层的麻烦 ...
今天在网上冲浪,看到了一个号称是最好懂的神经网络解释。我读完之后立马想到了遥感植被指数。
神经网络是 AI 的算法基础。
前些天,我在美国科普网站《量子杂志》(Quanta Magazine),读到一篇科普文章,用一个浅显的例子 + 插图,解释了神经网络,堪称我见过的最好懂的教程。
下面就是我整理出来的中文版。
1、
你的计算机里有一堆照片,你想要从中找出猫的照片,应该怎么做?
你很快意识到,这其实是一个机器分类问题,计算机要把照片分成两类:一类是猫,另一类不是猫。
2、
让我们把这个问题想成一张地图,中间有一条分界线,把地图分成两个国家。
你的任务是,找出这条分界线的确切位置。这样的话,给出任意一个点,你就知道它在分界线的左边还是右边。
3、
作为已知条件,地图上很多点的归属,是已知的。比如上图中,三角点属于 A 国,方块点属于 B 国。
你要做的就是,从这些点推测出分界线。
4、
我们可以建立一个数学函数(上图的点 N),处理这个问题。
这个函数接受两个参数,分别是每个点的 x 坐标和 y 坐标,函数的返回值是0~1之间的一个值,表示该点有多大概率属于当前国家。
5、
你 ...
import http.server
import socketserver
import urllib.parse
import html
import netifaces
DEFAULT_PORT = 8000
MAX_PORT_ATTEMPTS = 100 # 最大尝试端口数量
TEXT_HISTORY = [] # 存储提交的文本历史
class TextHandler(http.server.SimpleHTTPRequestHandler):
def do_GET(self):
# 处理favicon请求
if self.path == '/favicon.ico':
self.send_response(204) # No Content
self.end_headers()
return
self.send_response(200)
self.send_header("Content-type", ...
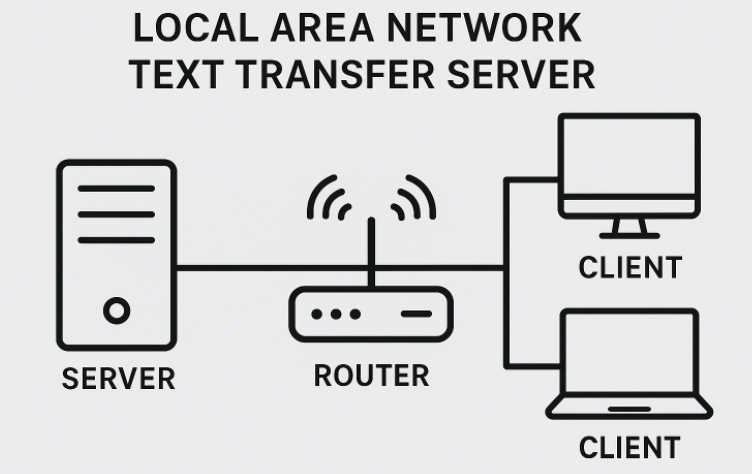
要将Windows 10的G盘设置为局域网内的NAS(网络附加存储),可以通过Windows的共享功能实现,其他局域网内的电脑可以访问共享的文件夹。以下是一个实现步骤的说明,并提供一个PowerShell脚本用于自动化设置共享文件夹和权限。
实现步骤概述
启用文件共享功能:确保Windows的网络发现和文件共享功能已开启。
设置共享文件夹:将G盘中的特定文件夹设置为共享,并配置访问权限。
防火墙设置:确保Windows防火墙允许文件和打印机共享。
局域网访问:其他电脑通过网络路径(如\IP地址\共享名)访问共享文件夹。
以下是使用PowerShell脚本自动设置G盘文件夹共享的代码:
# 确保以管理员身份运行
if (-NOT ([Security.Principal.WindowsPrincipal] [Security.Principal.WindowsIdentity]::GetCurrent()).IsInRole([Security.Principal.WindowsBuiltInRole] "Administrator")) {
Write-Warning "请 ...
昨天分享的谷歌影像下载器你们是否在用?你们是否觉得好用?
今天聊另一个话题,是关于我的技术债的问题。
我本人并不是计算机科班出门,很多东西都是都是干中学。学得越多发现不会的越多。
去年我曾计划好好学无人机影像处理,好好学SAR,好好学rust,好好学这些那些。
我的好朋友一直说我怎么这么多精力?
实际上个人的精力是有限。年纪上去了,游戏我现在只打王者荣耀了,电脑游戏也半年没玩过了。所以我空闲的时候就学习,学不动了就开一把王者…
昨天有人在评论区问我会什么?我大概只会一点点代码。
写代码的初衷是改造这个世界。以前我不懂代码的时候,被for循环震撼了。等我有一定的编程基础后,用for循环去实现批量处理影像。
这几年,我写过几个工具。这些工具有明显的需求,并且可以减轻繁琐的手动操作。
为什么学无人机影像处理?
这是出于个人对未来的考虑?能在未来做什么?以后想做什么内容?
至于怎么学?先看看这个领域和自己会的东西有没有重合,相似的地方在哪里,然后复现别人的操作。
这和写论文的路数差不多的,复现操作,找到痛点,提出改进。
可惜的是,无人机影像处理、sar、rust这几个领域我都处于复现操作 ...

深度学习
未读在深度学习中,PyTorch 的 .pth 文件常用于保存神经网络的模型权重(state_dict)。当我们看到一个 .pth 文件时,可能会好奇:这个模型到底有多少参数?
下面分为两部分,正推和反推。
正推假设我的模型有一百万个参数,那么我的pth模型多大?
在 PyTorch 中,模型参数通常以 32 位浮点数(float32)存储,每个参数占用 4 字节(32 bits ÷ 8 bits/byte = 4 bytes)。
因此,存储所有参数所需的总字节数为:
1,000,000 参数 × 4 字节/参数 = 4,000,000 字节
转换为 MB:
4,000,000 字节 ÷ (1024 × 1024) = 4,000,000 ÷ 1,048,576 ≈ 3.81 MB
基于上述计算,假设 .pth 文件只保存模型参数(state_dict),文件大小约为 3.81 MB。加上少量的元数据,实际大小可能略高于此值,但通常略比3.81mb大一些。
反推假设.pth 文件是100MB,那她可能有个多少参数?
1. 文件大小转换100MB 的文件大小需要转换为字节:
100 MB ...

